Model: HL-3625-C001
Storage Temperature Range: -30℃~80℃
Operating Temperature Range: -10℃~60℃
Temperature Range: 25℃±5℃
Humidity Range: 65%±10%
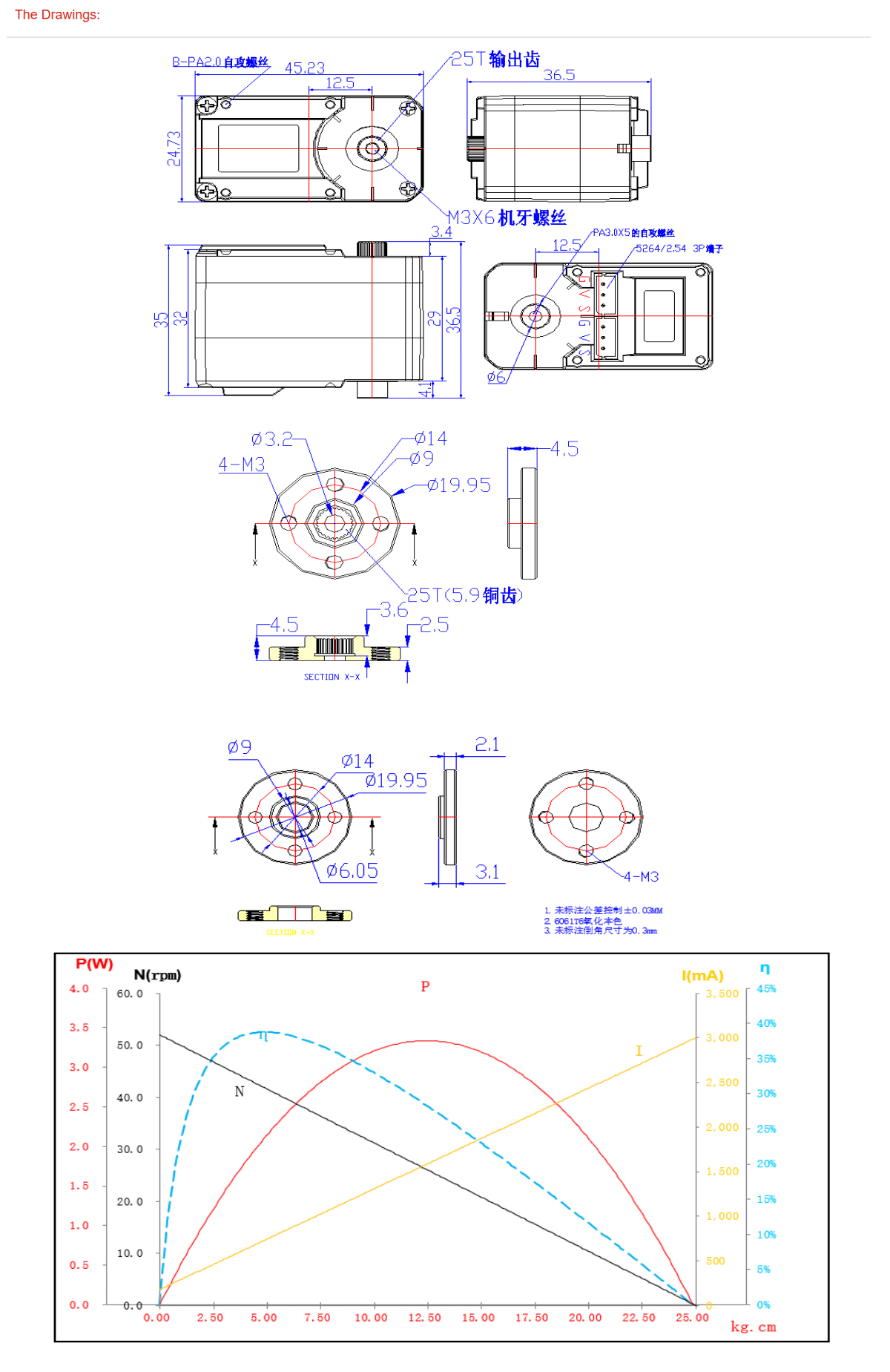
Size: 45.2*24.7*35mm
Weight: 55±1g
Gear Type: Copper
Limit Angle: No Limit
Bearing: Ball Bearings
Horn Gear Spline: 25T/OD5.9mm
Gear Ratio: 1/345
Rocker Backlash: 0°
Case: PA66+GF
Connector Wire: 150mm
Motor: Core Motor
Rated Input Voltage: 5V-8.4V
No Load Speed: 0.192sec/60°(52RPM)@7.4V
Running Current (At No Load): 180mA@7.4V
Peak Stall Torque: 25kg.cm@7.4V
Stall Current: 3.0A@7.4V
Rated Load: 6.2kg.cm@7.4V
Rated Current: 750mA@7.4V
Kt Constant: 8.3kg.cm/A
Terminal Resistance: 2.5Ω
Operating Modes: Mode 0: Angle Servo Mode (Default mode, absolute position controllable from 0-360 degrees); Mode 1: Motor Constant Speed Mode (Motor constant speed mode, maintains speed without deceleration as the load increases); Mode 2: Motor Constant Current Mode (Motor constant current mode, maintains current without decreasing with increasing load) can achieve absolute position
Multi-Loop Mode: Control of positive and negative 7 turns at the highest accuracy, but the number of power failure turns is not saved (the resolution can be expanded, and the number of turns can be doubled)
Constant Force Output: Set the output torque value, the servo can maintain this torque (input the target torque value corresponding to address 44, the servo can maintain this torque)
Command Signal: Digital Packet
Protocol Type: Half Duplex Asynchronous Serial Communication
ID Range: 0-253
Communication Speed: 38400bps~1Mbps
Control Algorithm: PID
Neutral Position: 180°(2048)
Running Degree: 360°(when 0~4096)
Resolution [deg/pulse]: 0.088°(360°/4096)
Rotating Direction: Clockwise(0→4096)
Feedback: Load, Position, Speed, Input Voltage, Current, Temperature