Model: HL-3925-C001
Storage Temperature Range: -30℃~80℃
Operating Temperature Range: -20℃~60℃
Temperature Range: 25℃ ±5℃
Humidity Range: 65%±10%
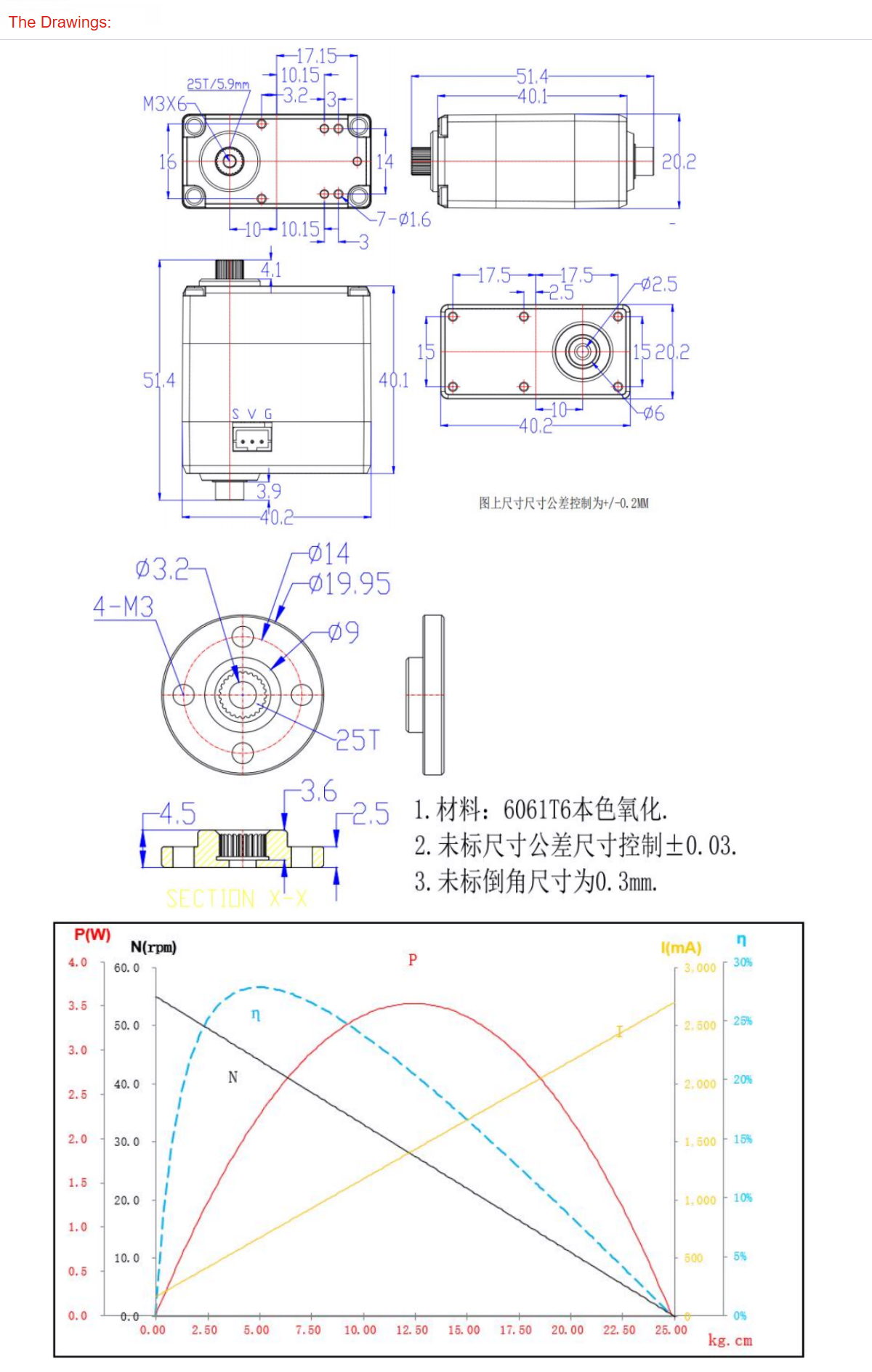
Size: 40.2*20.2*40mm
Weight: 61.7±1g
Gear Type: Copper
Limit Angle: No Limit
Bearing: Ball Bearings
Horn Gear Spline: 25T/OD5.9mm
Gear Ratio: 1/275
Case: Aluminium
Connector Wire: 15CM
Motor: Core Motor
Rated Input Voltage: 9V-12.6V
No Load Speed: 0.182sec/60°(55RPM)@12V
Running Current(At No Load): 170mA@12V
Peak Stall Torque: 25kg.cm@12V
Stall Current: 2.7A@12V
Rated Load: 4.8kg.cm@12V
Rated Current: 650mA@12V
KT Constant: 9kg.cm/A
Terminal Resistance: 2.39Ω
Operating Modes:
Mode 0: Angle Servo Mode (Default Mode, Absolute Position Controllable From 0-360 Degrees)
Mode 1: Motor Constant Speed Mode (Motor Constant Speed Mode, Maintains Speed Without Deceleration As The Load Increases)
Mode 2: Motor Constant Current Mode (Motor Constant Current Mode, Maintains Current Without Decreasing With Increasing Load) Can Achieve Absolute Position
Constant Force Output: Set The Output Torque Value, The Servo Can Maintain This Torque (Input The Target Torque Value Corresponding To Address 44, The Servo Can Maintain This Torque)
Multi-Loop Mode: Control Of Positive And Negative 7 Turns At The Highest Accuracy, But The Number Of Power Failure Turns Is Not Saved (The Resolution Can Be Expanded, And The Number Of Turns Can Be Doubled)
Command Signal: Digital Packet
Protocol Type: Half Duplex Asynchronous Serial Communication
ID Range: 0-253
Communication Speed: 38400bps ~ 1 Mbps
Control Algorithm: PID
Neutral Position: 180°(2048)
Running Degree: 360° (When 0~4096)
Resolution [Deg/Pulse]: 0.088°(360°/4096)
Rotating Direction: Clockwise(0→4096)
Feedback: Load, Position, Speed, Input Voltage, Current, Temperature