Model: SC-1250-C001
Storage Temperature Range: -30℃~80℃
Operating Temperature Range: -15℃~70℃
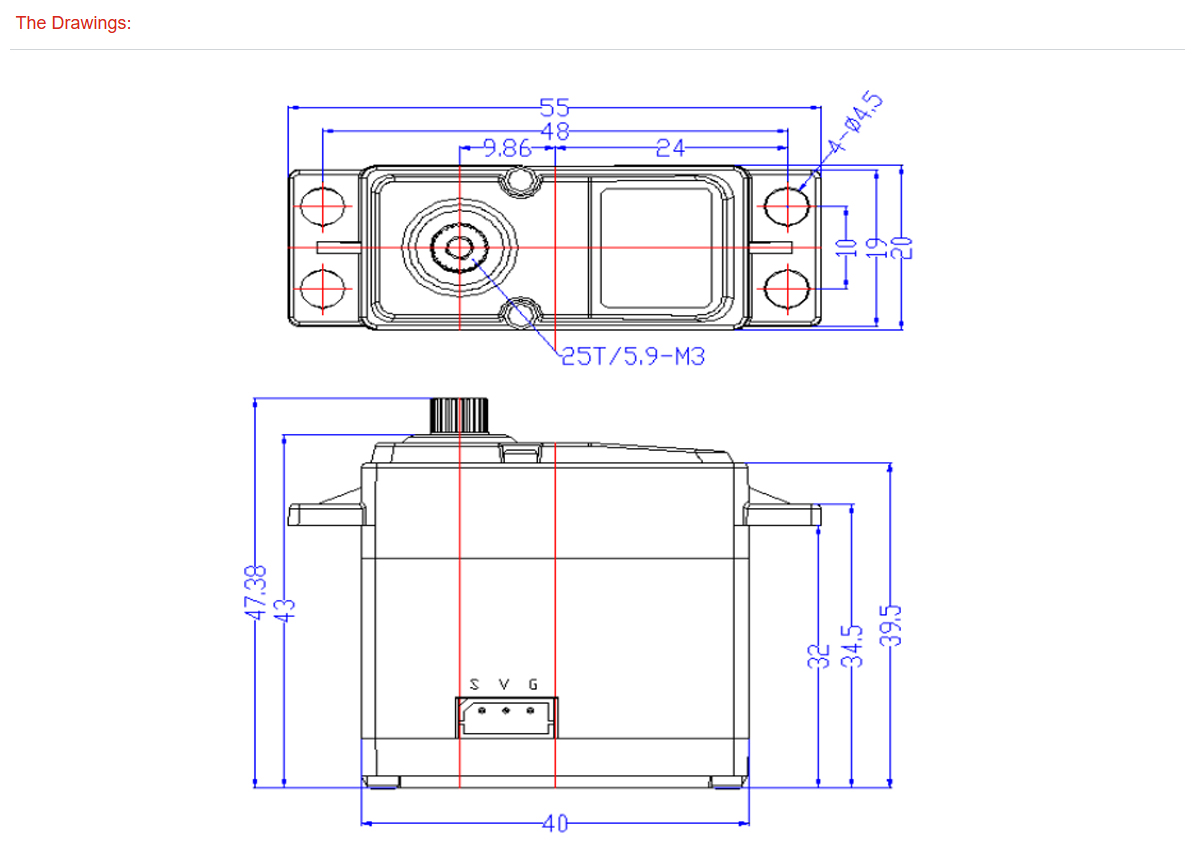
Size: 40.0*20.0*43mm
Weight: 63.5±1g
Gear Type: Steel
Limit Angle: No Limit
Bearing: Ball Bearings
Horn Gear Spline: 25T/OD5.9mm
Case: PA+Aluminum
Connector Wire: 150mm
Motor: Core Motor
Operating Voltage Range: 4V-8.4V
No Load Speed: 0.151sec/60°@7.4V
Running Current (At No Load): 250mA@7.4V
Peak Stall Torque: 25kg.cm@7.4V
Rated Torque: 8.3kg.cm@7.4V
Stall Current: 3.5A@7.4V
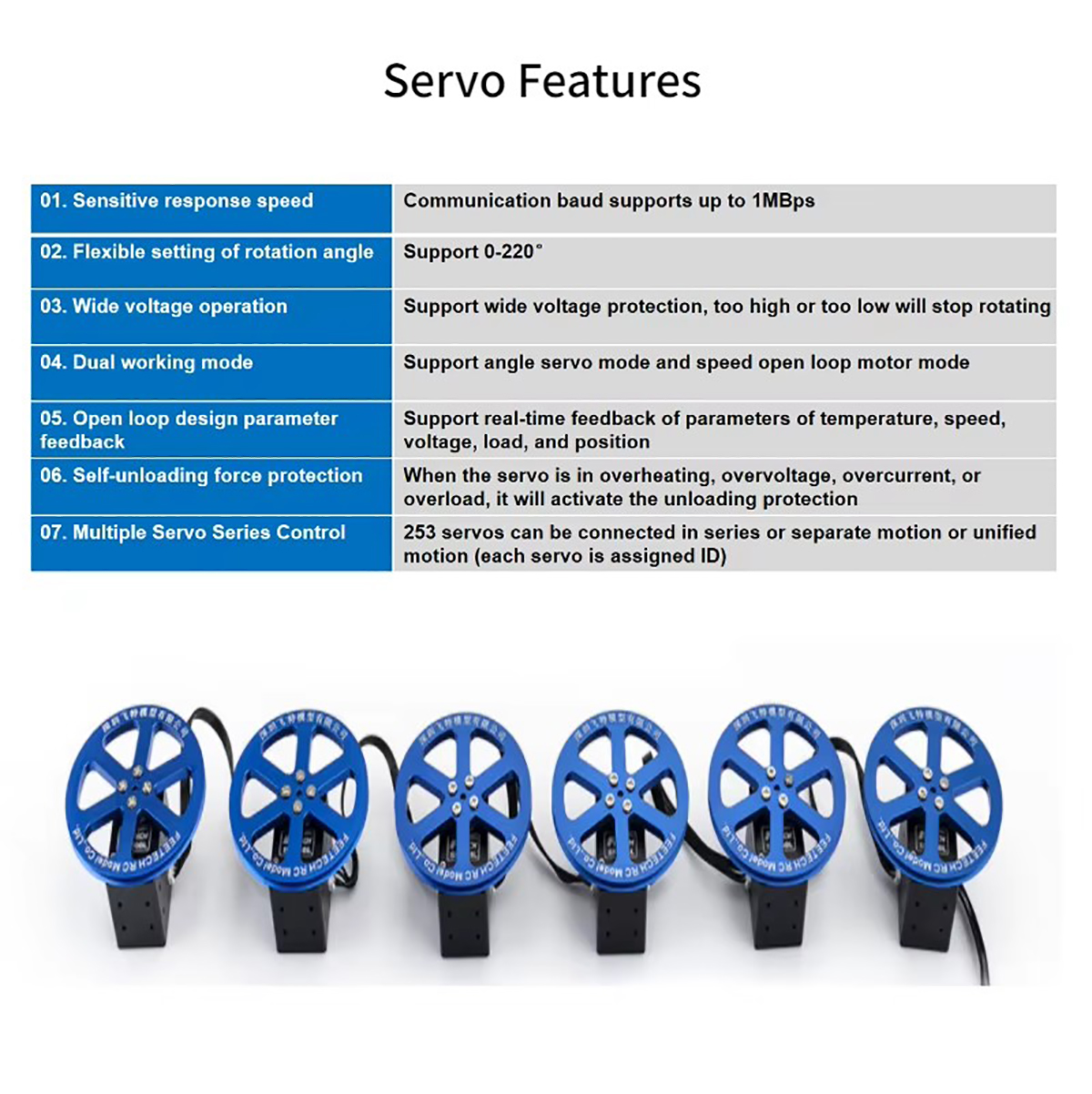
Command Signal: Digital Packet
Protocol Type: Half Duplex Asynchronous Serial Communication
ID Range: 0-253
Communication Speed: 38400bps~1Mbps
Running Degree: 220°(when 0~1024)
Feedback: Load, Position, Speed, Input Voltage, Temperature
Position Sensor Resolution: 0.215°(220°/1024)