

 Sign In
Sign In 





> Product details
HolyBro PX4 Vision Dev Kit V1.5 RC Drone Pixhawk 6C Flight Controller Companion Computer Occipital Structure Core Depth Camera

| Part No.: | HL-DEV-KIT |
| Manufacturer: | Holybro |
| Quantity: | out of stock |
Send to a friend
Features
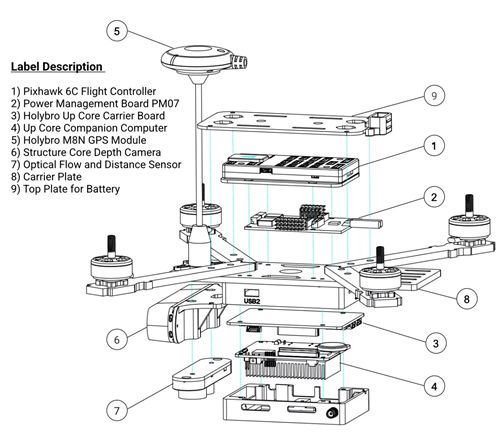
The PX4 Vision Autonomy Development Kit is a robust and inexpensive kit for enabling computer vision development on autonomous vehicles. The kit contains a near-ready-to-fly carbon-fiber quadcopter equipped with a Pixhawk 6C flight controller, a UP Core companion computer (4GB memory & 64GB eMMC), and a Occipital Structure Core depth camera sensor. Ships preassembled.
Note: This vehicle comes with no software preinstalled. There is a pre-imaged USB stick that has a reference implementation of the PX4/Avoidance local planner software provided by Auterion. This is a basic software used only as a reference to show the basic function the PX4 vision can do. Developers can use the kit to try out other features provided by the PX4 Avoidance project, modify the existing code, or experiment with completely new computer vision-based functionality.
Product Details
-
Core Components:
-
1x Pixhawk 6C flight controller (New with v1.5)
-
1x PMW3901 optical flow sensor (Connects via Serial)
-
1x TOF Infrared distance sensor (PSK‐CM8JL65‐CC5)
-
1x Structure Core depth camera
-
160 deg wide vision camera
-
Stereo infrared cameras
-
Onboard IMU
-
Powerful NU3000 Multi-core depth Processor
-
1x UP Core computer (4GB memory & 64GB eMMC with Ubuntu and PX4 avoidance)
-
Intel® Atom x5-z8350 (up to 1.92 GHz)
-
Compatible OS: Microsof t Windows 10 full version, Linux (ubilinux, Ubuntu, Yocto), Android
-
FTDI UART connected to flight controller
- USB1: USB3.0 A port used for booting PX4 avoidance environment from a USB2.0 stick (connecting a USB3.0 peripheral may jam GPS).
- USB2: USB2.0 port on a JST-GH connector. Can be used for second camera, LTE, etc. (or keyboard/mouse during development).
- USB3: USB2.0 JST-GH port connected to depth camera
- HDMI: HDMI out
- SD card slot
-
WiFi 802.11 b/g/n @ 2.4 GHz (attached to external antenna #1). Allows computer to access home WiFi network for Internet access/updates.
-
-
-
Mechanical Specification:
-
Frame: Full 5mm 3k carbon fiber twill
-
Motors: T-MOTOR P2207 V3.0 KV1750 (New with v1.5)
-
ESC: BEHEli-S 20A ESC
-
Propellers: 6030-3 (New with v1.5)
-
GPS: Holybro M8N GPS module with Carbon Fiber Mast
-
Power module: Holybro PM07
-
Wheelbase: 286mm
-
Weight: 893 grams without battery or props
-
Telemetry: ESP8266 connected to flight controller (attached to external antenna #2). Enables wireless connection to the ground station.
-
-
A USB2.0 stick with pre-flashed software provided by Auterion that bundles:
-
Ubuntu 18.04 LTS
-
ROS Melodic
-
Occipital Structure Core ROS driver
-
MAVROS
-
PX4 Avoidance
-
-
Assorted cables, 8x propellers, 2x battery straps (installed) and other accessories (these can be used to attach additional peripherals).
Item Packing
Detailed Images







Recommended products list
- RadioMaster Boxer 2.4G 16ch Hall Gimbals Transmitter Remote Control ELRS Support EDGETX for RC Drone
- Tarot TL3T21 3-Axis Gimbal Camera 640 Thermal Imaging Camera & Visible Light Camera for RC Drone Power Inspection and Fire Fighting
- RadioMaster TX16S MKII V4.0 16CH 2.4G Hall Gimbals Transmitter Remote Control 4in1 Support EDGETX OPENTX for RC Drone
- FIMI X8SE 2022 Version 10km RC Drone With 3-Axis Gimbal 4K Camera HDR Video GPS Helicopter New
- DarwinFPV F411 AIO Flight Controller Whoop Blheli_S Betaflight F4 15A OSD BEC BL_S 1-3S 4In1 ESC for RC Drone FPV Racing
- HEX Mauch Sensor Hub X2 V2 PL/PC Series Power Module With CFK Enclosue For Pixhawk2 PIX Flight Control RC Drone Parts
- GARTT ML4108 500KV Brushless Motor For Mult-irotor Quadcopter Helicopter RC Drone
- RMILEC T4047NB20 433mhz Receiver UHF 20CH Rx For RC Drone Parts
- GARTT ML5210 340KV Brushless Motor For Multicopter Quadcopter Hexacopter RC Drone
- Radiolink T8S FHSS 8CH Bluetooth Version RC Handle Transmitter with R8FM 2.4GHz Receiver for RC Drone
- D6 M3*30 Aluminum Column for Frame Kit RC Drone FPV Racing 10pcs
- 5 PCS iFlight 20x250mm Microfiber PU Leather Lipo Battery Strap for RC Drone FPV Racing
- RadioMaster TX16S Hall Sensor Gimbals 2.4G 16CH Multi-protocol OpenTX Transmitter for RC Drone
- FrSky Taranis X9 Lite S 2.4GHz 24CH ACCESS ACCST D16 Transmitter Wireless Training System Blue for RC Drone
- T-motor F55A PROⅡ F3 6S 4IN1 32bit w/ LED DSHOT1200 Brushless ESC for RC Drone
- FrSky Taranis X-Lite Pro 2.4GHz 24CH Radio Transmitter Longer Telemetry Range for RC Drone FPV Racing Multi Rotor
- T-motor F55A PROII 55A 3-6S 4 IN 1 Blheli_32 32bit w/ LED DSHOT1200 Brushless ESC 30.5X30.5MM for RC Drone FPV Racing
- Matek System XCLASS FCHUB-12S PDB Board 5V & 12V Output w/ Current Sensor 3-12S Lipo for RC Drone
- Topsky 2 Inch 5.8Ghz 48CH FPV Watch Monitor Receiver OSD Built-in Battery MMCX for RC Drone
- PGYTECH 75CM Fast-fold landing pad for DJI MAVIC PRO spark Phantom 2 3 4 inspire 1 2 helipad RC Drone parts Accessories
- NEW HotRC HT-8A 2.4GHz 8CH 8A RC Transmitter PWM FHSS with F-08A Receiver Radio System Remote Controller for RC Drone
- Runcam HDZero Nano V2 720p 60fps FOV 150 FPV Camera for RC Drone HDZero SharkByte VTX Digital HD Video System FPV Goggles Racing
- Holybro Microhard P900 Radio Telemetry Digital Wireless Module for PIXHAWK APM PX4 RC Drone
- T-motor New released ALPHA 60A 12S HV Speed Controller for RC Drone Multirotor FPV Plane Brushless Motor MN605S U8II
- SUNNYSKY V5210 300KV 1100W 4.0mm 4-6S Outrunner Brushless Motor For Multi-copter Fix-wing RC Drone
- Jumper T15 2.4Ghz Radio Controller ELRS 1000mW With 3.5 HD Touch Screen Hall Sensor Suitable For Long Range RC Drones-Space Gray
- Gemfan Fury 5131.0 5.1x3.1 5.1-inch 3-Blade Propeller PC 5mm Hole for Freestyle FPV Racing RC Drone-Mint Green
- iFlight Fullsend E 22.2V 4000mAh 15C 6S1P Moli21700-P45B LiPo Battery with XT60H Connector for RC Drone
- 4PCS Brotherhobby Avenger 3320 400KV Brushless BLDC CW Motor RC Drone Racing Motor Accessory FPV Drones Drone Accessories
- Hobbywing Platinum 120A V5 VBar Telemetry Ready Brushless ESC for RC Drone Aircraft Helicopter
- Mateksys R24-P6V ExpressLRS ELRS 2.4GHz 6CH PWM Vario Receiver Dual Antenna for RC Drone Airplane
- Holybro H-RTK mosaic-H (Dual Antenna Heading) RTK GPS module IST8310 magnetometer For RC Drone Quacopter Mulitcopter Airplane
- Hobbywing Platinum HV 180A SBEC V5 6-14S Lipo Brushless ESC for RC Drone Helicopters Aircraft
- Walksnail Avatar HD Goggles X OLED 5.8Ghz Digital 1920*1080 FOV 50 Degree HDMI Built-in Gyro with Antennas for FPV RC Drone
- New JIYI P3 RC Flight Controller Multirotor Autopilot Flight Control System for RC Drone Quadcopter
- RadioMaster Boxer 2.4G 16ch Hall Gimbals Transmitter Remote Control CC2500 Support EDGETX for RC Drone
- RadioMaster Boxer 2.4G 16ch Hall Gimbals Transmitter Remote Control 4in1 Support EDGETX for RC Drone
- FlySky FS-IBG01 GPS Module Support GPS Beidou Satellite Dual Satellite System Positioning For RC Car RC Boat Robot RC Drone
- CUAV New Pixhawk V6X Autopilot Flight Controller with NEO 3 GPS GPS for FPV RC Drone Quadcopter
- HolyBro PX4 Vision Dev Kit V1.5 RC Drone Pixhawk 6C Flight Controller Companion Computer Occipital Structure Core Depth Camera
- Matek MATEKSYS F405-WTE F405 STM32F405RET6 Flight Controller Built-in OSD SD Slot DPS310 for RC Drone
- CUAV X7+ PRO Flight Controller Open Source Autopilot With NEO 3 GPS for PX4 ArduPilot FPV RC Drone Quadcopter
- CUAV X7+ Flight Controller NEO 3 GPS Pixhawk Open Source PX4 ArduPilot GNSS FPV RC Drone Quadcopter
- RadioMaster TX12 MKII 16ch Hall Gimbals Support OPENTX and EDGETX Remote Control Transmitter ELRS For RC Drone
- Hobbywing Platinum HV 130A V4 BEC / OPTO 6-14S Lipo Empty mold Brushless ESC for RC Drone Helicopters Aircraft
- DMKR LS-5804 3 inch FPV Mini Handheld LCD Monitor 480*320 IPS Screen With DVR Built-in Battery for DJI goggles FPV RC Drone
- Hawkeye Little Pilot AR V2 DVR 5inch 800x480 5.8G 48CH Dual Receiver Foldable Detachable FPV Goggles For Shortsighted RC Drone
- GARTT YPG LV-18A (2-6S) Brushless Speed Controller ESC For RC Drone Airplane Engine Accessories
- 8 Pairs High Quality 7040 7 Inch 3 Blade Propeller 8 CW 8 CCW for RC Drone FPV Racing Quadcopter DIY Parts - Clear Black
- 8 Pairs High Quality 7040 7 Inch 3 Blade Propeller 8 CW 8 CCW for RC Drone FPV Racing Quadcopter DIY Parts - Bright Yellow
- 8 Pairs High Quality 7040 7 Inch 3 Blade Propeller 8 CW 8 CCW for RC Drone FPV Racing Quadcopter DIY Parts - Red
- HEX Mauch Sensor Hub X2 3D Enclosure Power Module For Pixhawk2 PIX Flight Control RC Drone Parts
- HEX Mauch Sensor Hub X2 HS Series Power Module For Pixhawk2 PIX Flight Control RC Drone Parts
- 20mm Carbon Tube Motor Mount Seat Holder Red for RC Quadcopter Multicopter DIY Accessories RC Drone
- 20mm Carbon Tube Motor Mount Seat Holder Black for RC Quadcopter Multicopter DIY Accessories RC Drone
- GARTT ML4108 620KV Brushless Motor For Multi-rotor Quadcopter Hexacopter RC Drone
- GARTT ML4114 400KV Brushless Motor For Multirotor Quadcopter Hexa DJI S800 S1000 RC Drone
- GARTT ML4114 330KV Brushless Motor For Multirotor Quadcopter Hexa DJI S800 S1000 RC Drone
- DIATONE MAMBA F411 35A AIO 6S 8bit Flight Controller Stack Internal USB 20mm/M2 for RC Drones DIY Parts
- Blacksheep TBS MAMBO 2.4G Transmitter Lower Latency Remote Controller For RC Drone
- Blacksheep TBS MAMBO Ethix 2.4G Transmitter Lower Latency Remote Controller With Retractable Kickstand For RC Drone
- Ultra Power UP1100 2-6S 1100W 22A Dual Channel Intelligent Charger For RC Drone LiPo/LiHV Battery Charing
- GARTT ML5008 330KV Brushless Motor For Multicopter Hexacopter RC Drone T960 T810
- GARTT ML5008 400KV Brushless Motor For Multicopter Hexacopter T960 T810 RC drone
- Skydroid 5.8Ghz 150CH UVC OTG Smartphone Dual Antenna FPV Receiver for Android Tablet PC RC Drone-Black
- Skydroid 5.8Ghz 150CH UVC OTG Smartphone Dual Antenna FPV Receiver for Android Tablet PC RC Drone-White
- Caddx Ratel 2 FPV Micro Size Starlight Low Latency Freestyle FPV Camera 1200TVL For Quadcopter Rc Drone Parts
- T-motor Flame 100A HV 500HZ 6-14S LIPO ESC For Helicopter Multi-rotor Quadcopter UAV RC Drones
- SKYRC PC1500 25A 12/14S 1500W Battery Charger with Built-industry CAN Bus Communication For RC Drone Toys Outdoor Camping
- HENGE 6A UBEC Output 5V/6A 6V/6A,2-6S LIPO 6-16 cell Ni-Mh Input Switch For RC Drone UBECL6
- HENGE 8A UBEC Output 5V/8A 6V/8A Max 12A Inport 2-6S Lipo / 6-16 cell Ni-Mh Input Switch for RC Drone
- T-motor Foldable FA32.2*10.5 - 1Pair CF Prop For Aircraft Airplanes Quadcopter UAV RC Drone
- HEX Mauch 4-14S Backup BEC/5.3V For Pixhawk2 PIX Flight Control RC Drone Parts
- MHEX auch 4-14S HYB-BEC/5.3V For Pixhawk PIX Flight Control RC Drone Parts
- HEX Mauch 2-6S Backup BEC/5.35V For Pixhawk2 PIX Flight Control RC Drone Parts
- HEX Mauch 2-6S BEC/5.35V For Pixhawk PIX Flight Control RC Drone Parts
- HEX Mauch Power Module For Pixhawk2 PIX Flight Control 200A/14S RC Drone Parts
- HEX Mauch Power Module For Pixhawk2 PIX Flight Control 200A/6S RC Drone Parts
- HEX Mauch Power Module For Pixhawk2 PIX Flight Control 100A/14S RC Drone Parts
- HEX Mauch Power Module For Pixhawk2 PIX Flight Control 100A/6S RC Drone Parts
- 2pair Yellow Gemfan Hurricane SL 5125 5.1inch 3-blade 1.5mm 2mm FPV Racing Freestyle Propeller for RC Drone
- 2pair Pink Gemfan Hurricane SL 5125 5.1inch 3-blade 1.5mm 2mm FPV Racing Freestyle Propeller for RC Drone
- 2pair Blue Gemfan Hurricane SL 5125 5.1inch 3-blade 1.5mm 2mm FPV Racing Freestyle Propeller for RC Drone
- 2pair Green Gemfan Hurricane SL 5125 5.1inch 3-blade 1.5mm 2mm FPV Racing Freestyle Propeller for RC Drone
- RCINPower GTS V2 1202.5 11500KV 1-2S Brushless Motor for RC Drone FPV Racing Models Spare Part DIY Accessories
- RCINPower GTS V2 1202.5 6000KV 3-4S Brushless Motor for RC Drone FPV Racing Models Spare Part DIY Accessories
- Holybro H-RTK F9P Helical GPS Module Base Station for Pixhawk Flight Controller FPV Racing RC Drone Parts 12018
- Sunnysky E-R2205 2500KV Brushless Motor 3-4S CW For RC Drone FPV Racing Multi Rotor Quadcopter Bule
- Sunnysky E-R2205 2300KV Brushless Motor 3-4S CW For RC Drone FPV Racing Multi Rotor Quadcopter Red
- KINGMAX CLS0911W 26g Digital Metal Gears Wing Servo High Voltage High Speed Coreless Motor for Fixed-wing RC Drones
- AMASS XT60E1-M Mountable XT60 Male Plug Connector for RC Drone FPV Racing Fixed Board DIY Spare Part
- Skyzone Cobra X V4 1280x720 5.8Ghz 48CH RapidMix Receiver FPV Goggles With Head Tracker DVR For RC Drone
- Servos Parabolic Launcher Line Thrower Upgraded Steering Gear Tool Release Switch for MG995 Servo FPV Racing RC Drone
- FatShark Dominator HDO2 4:3 OLED Display FPV Video Goggles for RC Drone
- Futaba R7103SB 2.4G high gain antenna receiver S.BUS / S.BUS2 / FASSTest / HV UAV receiver RC drone aircraft parts
- RadioMaster TX16S MAX Edition 2.4G 16CH Hall Sensor Gimbals Multi-protocol RF System OpenTX Mode2 Transmitter with CNC and Leather for RC Drone - Carbon Fiber (Left Hand Throttle)
- 2 Pairs T-motor T5146 5146 5 Inch 3-blade Propeller compatible POPO for FPV RC Drone - Yellow
- 2 Pairs T-motor T5146 5146 5 Inch 3-blade Propeller compatible POPO for FPV RC Drone - Clear Red
- 2 Pairs T-motor T5146 5 Inch 3-blade Propeller compatible POPO for FPV RC Drone - Clear Blue
- Emax ECO II 2807 4S 1700KV Brushless Motor for FPV Racing RC Drone
- Emax ECO II 2807 5S 1500KV Brushless Motor for FPV Racing RC Drone
- Emax ECO II 2807 6S 1300KV Brushless Motor for FPV Racing RC Drone
- EMAX ECO II 2306 4S 2400KV Brushless Motor for FPV Racing RC Drone
- EMAX ECO II 2306 6S 1900KV Brushless Motor for FPV Racing RC Drone
- EMAX ECO II 2306 6S 1700KV Brushless Motor for FPV Racing RC Drone
- T-MOTOR P60 Pin 340KV 6S Brushless Motor for Quadcopter MultiRotor Rc Drone
- T-MOTOR P60 Without Pin 340KV 6S Brushless Motor for Quadcopter MultiRotor Rc Drone
- T-motor BLACK BIRD V2.0 2800KV 6S Brushless Motor for FPV Racing RC Drone
- T-Motor F60 Pro IV 1750KV 4-6S Brushless Motor for RC Drone FPV Racing
- T-Motor F40 Pro IV 2306 2400KV 4S Brushless Motor for RC Drone FPV Racing
- T-Motor F40 Pro IV 2306 1950KV 4-6S Brushless Motor for RC Drone FPV Racing
- 2PCS/PAIR T-Motor NS28x9.2 inch carbon Fiber propeller for UAV RC Drone
- Amass XT30UPB 2mm Plug Male Bullet Connectors Plugs For RC Drone Airplane Battery
- Amass XT30UPB 2mm Plug Female Bullet Connectors Plugs For RC Drone Airplane Battery
- Foxeer Mini Standard Razer 1200TVL 16:9 PAL NTSC Switchable 4ms Latency FPV Camera For RC Drone
- Dalprop Fold 5.1" Folding Propellers Smooth DIY FPV Prop for FPV Racing RC Drone - Black
- Dalprop Fold 5.1" Folding Propellers Smooth DIY FPV Prop for FPV Racing RC Drone - Red
- Dalprop Fold 5.1" Folding Propellers Smooth DIY FPV Prop for FPV Racing RC Drone - Purple
- RunCam Racer Nano 2 CMOS 1000TVL 1.8mmGesture Control OSD for RC Drone
- FrSky Taranis Q X7 ACCESS 2.4GHz 24CH Mode2 Transmitter with R9M 2019 Long Range Module for RC Drone
- FlySky FTr4 2.4GHz 4CH AFHDS 3 RC Receiver Support PWM/PPM/I.bus/S.bus for RC Drone Fixed Wings
- FlySky FTr16S 2.4G 16CH AFHDS 3 RC Receiver Support i-BUS/S-BUS/PPM Output for RC Drone
- FrSky Taranis X9 Lite S 2.4GHz 24CH ACCESS ACCST D16 Transmitter Wireless Training System Gray for RC Drone
- Radiolink AT9S Pro 2.4G 12CH DSSS FHSS Transmitter with R9DS Receiver Compatible TBS Crossfire Module for RC Drone
- FlySky FTr10 2.4G 10CH AFHDS 3 RC Receiver Support i-BUS/S-BUS/PPM Output for RC Drone
- Sunnysky E-R2207 1800KV CCW 3-6S Brushless Motor for RC Drone FPV Racing
- Sunnysky E-R2207 1800KV CW 3-6S Brushless Motor for RC Drone FPV Racing
- Sunnysky E-R2207 2580KV CCW 3-4S Brushless Motor for RC Drone FPV Racing
- Sunnysky E-R2207 2580KV CW 3-4S Brushless Motor for RC Drone FPV Racing
- Sunnysky R2207 2207 Brushless Motor 1800KV 3-6S CW For RC Drone FPV Racing
- Sunnysky R2207 2207 Brushless Motor 1800KV 3-6S CCW For RC Drone FPV Racing
- Sunnysky R2207 2207 Brushless Motor 2580KV CW 3-4S For RC Drone FPV Racing
- Sunnysky R2207 2207 Brushless Motor 2580KV CCW 3-4S For RC Drone FPV Racing
- Flysky IA8X 2.4G 8CH PPM i-BUS Mini Receiver for AFHDS 2A FS-NV14 RC Drone Radio
- Flysky X8B 2.4G 8CH PPM i-BUS Mini Receiver for AFHDS 2A FS-NV14 RC Drone Radio
- T-Motor F1507 2700KV 3-6S Brushless Motor for Cinewhoop RC Drone FPV Racing
- RUSH TANK PLUS VTX 5.8GHz 48CH Smart Audio 0/25/200/500/800mW Switchable FPV Transmitter For RC Drone
- FatShark Dominator HDO 4:3 OLED Display FPV Video Goggles for RC Drone Toys Accs
- 2 Pairs Gemfan WinDancer 5043 5x4.3x3 3-blade 5 Inch PC CW CCW Propeller for RC Drone FPV Racing
- ISDT FD-200 200W 25A Support 2-8S Lipo Battery Discharger for RC Drone
- Sailfly-X Spare Part 6 Pairs 65mm 2-Blade Propeller w/ 1.5mm Mounting Hole for RC Drone FPV Racing
- T-Motor F4 Premium Flight Controller AIO OSD 5V BEC Support TBS Nano Receiver for RC Drone
- FrSky Taranis X9 Lite 2.4GHz 24CH ACCESS ACCST D16 Mode2 Blue Classic Form Factor Portable Transmitter for RC Drone
- RunCam Nano 2 1/3" 700TVL 2.1mm FOV 155 Degree CMOS FPV Camera for FPV RC Drone
- RunCam Nano 2 1/3" 700TVL 1.8mm FOV 170 Degree CMOS FPV Camera for FPV RC Drone
- Foxeer Echo Patch 5.8G 8DBi RHCP FPV Antenna SMA Male White/Red for RC Drone
- Foxeer Echo Patch 5.8G 8DBi LHCP FPV Antenna SMA Male White/Red for RC Drone
- T-Motor F45A V2 45A 3-6S BLHeli_32 Dshot1200 ESC For RC Drone FPV Racing Multi Rotor
- T-Motor Fashional Carbon Fiber Propeller G29x9.5 Prop-2PCS/PAIR CF Prop For multirotor UAV RC Drones
- T-Motor Flame 100A LV ESC Electronic Speed Controller For UAV RC Drone Boom Lift
- Gemfan Windancer 5043 5×4.3 5 Inch 3-Blade Propeller M5 2 CW & 2 CCW for RC Drone FPV Racing
- EMAX 1606 RS1606 4000KV Brushless Motor 3-4S For RC Drone FPV Racing Multi Rotor
- EMAX 1606 RS1606 3300KV Brushless Motor 3-4S For RC Drone FPV Racing Multi Rotor
- Sunnysky M8 170KV Brushless Motor Industrial Drone Motor for RC Drone
- Sunnysky M8 100KV Brushless Motor Industrial Drone Motor for RC Drone
- PGYTECH 110CM Fast-fold landing pad for DJI MAVIC PRO spark Phantom 2 3 4 inspire 1 2 helipad RC Drone parts Accessories
- FrSky Taranis X-Lite Transmitter Replacement Parts BRACE Lite & Long+Short Gimbal Stick Ends Hang Strap Fixing Part for RC Drone
- 16000KV 820 Motors CW CCW for KINGKONG/LDARC TINY 7X RC Drone Quadcopter Spare Parts
- Germany imported High Speed Steel Plating Hex Screwdriver Tool Set 1.5/2/2.5/3mm For RC Drone Aircraft Model Repair Tools
- Hobbywing Platinum 25A V4 Brushless Electronic Speed controller ESC for RC Drone
- lycolor Raptor390 Tower (2-4S 30A) 4 IN 1 ESC + F3 Flight Control for RC Drone
- JJRC H37 Quadcopter Mini Selfie RC Drone Elfie 2.4G HD WiFi Camera Headless FPV
- Flysky FS-X6B 6Channel Receiver PWM i-BUS Voltage Sensor for RC Drone Quadcopter
